Magnetostriction
Functional Description of Magnetostrictive Linear Encoders
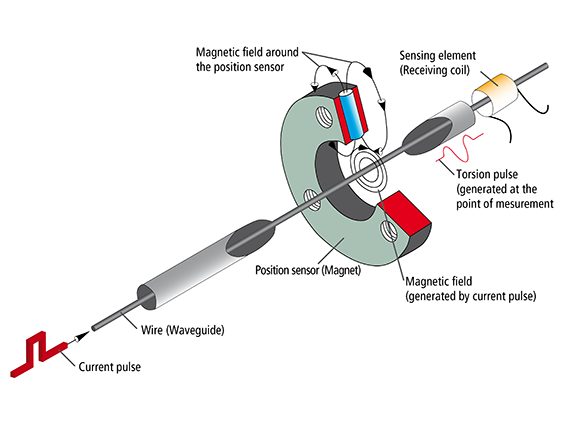
The magnostrictive linear encoders of TR capture linear movements and convert them into electrical output signals. This measuring principle is based on a travel time delay measurement. Current pulses are sent through a magnetostrictive wire, positioned inside a protective tube, creating a ring-shaped magnetic field around the wire. A non-contact permanent magnet serves as a position sensor, touching the waveguide with its magnetic field. The magnetic field created by the current pulses generates a magnetostriction at the point of measurement due to the two differently aligned magnetic fields. The resulting torsion pulse spreads out from the position sensor with constant ultrasonic speed, moving along the waveguide in both directions. The time difference between the transmission of the torsion pulse and its arrival at the sensing element at the detector head is converted electronically into a distance proportional signal, which is provided either as a digital or analog output signal.